Autonomous Subsurface Intelligence
Advanced robotic systems for autonomous survey and mapping where human exploration is too dangerous—from lunar lava tubes to active blast zones in terrestrial mines.
EXPLORE APPLICATIONSAdvanced robotic systems for autonomous survey and mapping where human exploration is too dangerous—from lunar lava tubes to active blast zones in terrestrial mines.
EXPLORE APPLICATIONSUnderground blast zones combine toxic gases, structural instability, unexploded charges, and zero visibility—yet mines must inspect before resuming operations.
Human inspectors face unacceptable safety risks (43% of mining fatalities occur underground)
Operations halt while waiting for air quality clearance and manual inspection
Drones require line-of-sight and can't penetrate deep tunnel networks
Every delay cascades: idle machinery, missed production targets, mounting costs
A coordinated fleet of quadruped robots and drones that autonomously survey post-blast zones. We replace dangerous human entry with reliable, multi-agent autonomy.
Reinforcement learning-based locomotion allows our fleet to navigate complex rock debris and deep tunnel networks without GPS or constant communication.
Real-time detection of gas concentrations, structural fractures, and water ingress using onboard VLA (Vision-Language-Action) models.
Synthesized safety reports delivered to surface operators, enabling faster, safer re-entry decisions.
Modular platforms that reconfigure for any terrain

Optimized for rapid movement across lunar maria and established routes. Efficient long-distance travel to lava tube entry points.
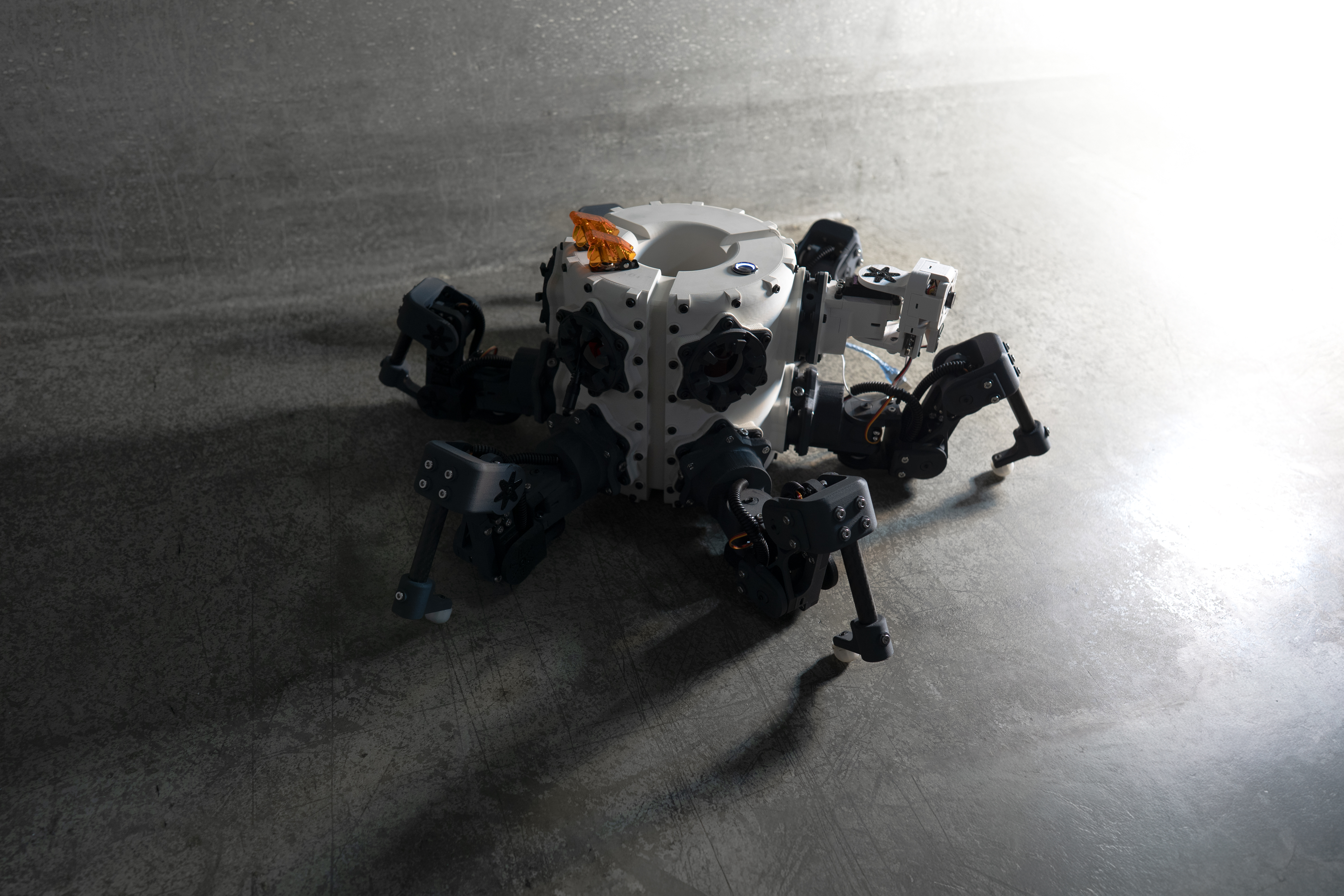
Six-legged system for navigating boulder fields, crater walls, and lava tube interiors. Trained through reinforcement learning for unpredictable underground terrain.
Our autonomous robotic platforms navigate and map GPS-denied, feature-sparse underground environments where human presence is dangerous or impossible. From extraterrestrial exploration to terrestrial mining operations, we provide critical subsurface intelligence.

Modular robots rapidly reconfigure between hexapod and tracked modes for optimal mobility across varied terrain
Trained in NVIDIA Isaac Sim to develop adaptive behaviors for unpredictable subsurface environments and GPS-denied conditions
Real-time simultaneous localization and mapping optimized for dark, feature-sparse underground environments
Multi-robot coordination with distributed mapping capabilities, maintaining connectivity in complex subsurface structures

Reinforcement learning, sim-to-real pipeline, foundation model fine-tuning, and robot controls. Middlebury College, SCI-Arc M.Arch.

Computational design, rapid prototyping, additive manufacturing, and embedded systems integration. SAIC BFA, SCI-Arc M.Arch.

Motion planning under uncertainty, multi-agent autonomy, space robotics, and GPS-denied navigation. MIT PhD, NASA JPL, USC Viterbi ASTE.

Legged locomotion, robot-terrain interactions, bio-inspired mobility, and proprioceptive terrain sensing. Georgia Tech PhD, NSF CAREER, USC Viterbi ECE.
We're partnering with space agencies, mining operators, research institutions, and commercial entities to deploy autonomous systems in the world's most challenging underground environments.
CONTACT US